
")























作品詳情
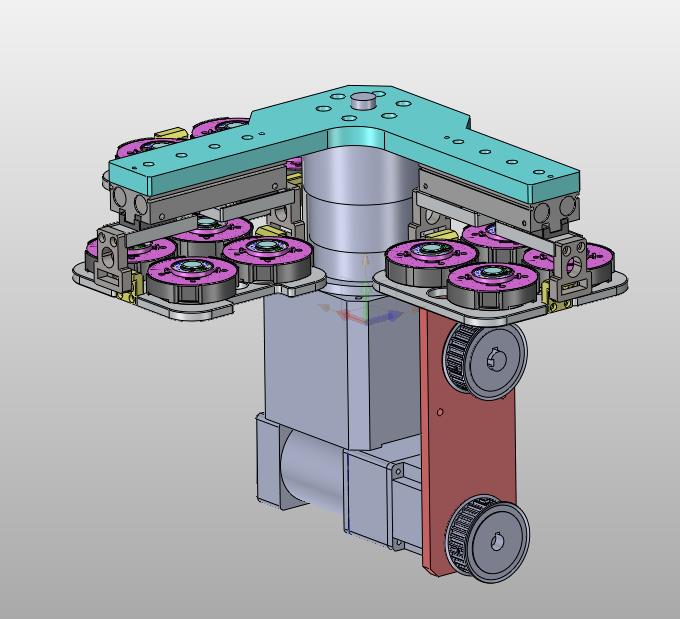
連續(xù)懸臂式回轉(zhuǎn)搬運(yùn)抓手是一種先進(jìn)的物料搬運(yùn)設(shè)備,其設(shè)計結(jié)合了懸臂回轉(zhuǎn)與精準(zhǔn)抓放功能。該設(shè)備通過連續(xù)旋轉(zhuǎn)和精確的定位控制,實現(xiàn)對物料的高效、連續(xù)搬運(yùn)。其懸臂式結(jié)構(gòu)能夠靈活調(diào)整抓取位置,適應(yīng)不同尺寸和形狀的物料。同時,該抓手具備高效的動力學(xué)與穩(wěn)定性控制,確保在高速運(yùn)轉(zhuǎn)時仍能保持精準(zhǔn)抓取與平穩(wěn)搬運(yùn),廣泛應(yīng)用于物流、倉儲及制造業(yè)等領(lǐng)域。



平diy桌面級快速成型3D打印機(jī)")

電機(jī)4軸高精度自動化機(jī)械臂")


動臺袋子印畫設(shè)備")



")

床")
全面罩")
擠出頭加熱鋁塊黃銅打印頭噴嘴")


